Count on Design Software for Millimeter-Wave Automotive Radar and Antenna System Development, Part 1

Download a PDF of this article.
Ongoing developments in advanced driver assistance systems (ADAS) are expanding the capabilities and affordability of vehicles that can alert and assist drivers using radar technology mostly focused over the 76-to-81 GHz spectrum. These systems must perform over a range of applications, operating conditions, and object-detection challenges in order to provide reliable coverage over the range (distance) and field of view (angle) as dictated by the particular driver assistance function.
This article examines some of the challenges behind developing millimeter-wave radar systems and the antenna-array technologies that will be responsible for the next generation of smart cars and trucks. Part 1 provides an overview of ADAS systems and discusses various radar systems and architectures. Part 2 discusses multi-beam and multi-range design and examines antenna design for multiple-input, multiple-output (MIMO) and beam-steering technologies for 5G that will be useful for automotive safety in the future.
Overview of ADAS
To obtain high safety ratings, automobile manufacturers are equipping their new models with driver assistance systems made possible through a network of sensors that perform specific safety functions. Manufacturers are currently implementing these systems based on vision sensor technology and radar systems operating at either 24 and/or 77 GHz. Vision systems detect lane markings and process other visual road information. However, they are susceptible to inadequate performance due to precipitation—particularly snow and fog—as well as distance.
Long-range radar (LRR) supports multiple functions, comfortably handling distances between 30 and 200 meters, while short-range radar (SRR) can detect objects within distances of 30 meters. While the 24-GHz frequency band, which addresses SRR detection, is expected to be phased out of new vehicles by 2022, today it is commonly found in hybrid architectures. Meanwhile, the 77-GHz band (76 to 81 GHz) supporting LRR is expected to provide both short- and long-range detection for all future automotive radars. Figure 1 provides details on short/medium- and long-range radar.
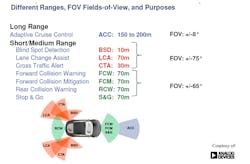
1. Shown here are different ranges, field-of-views (FOVs), and functions for ADAS systems. (Image courtesy of Analog Devices)
Technical advantages of the 77-GHz band include smaller antennas (a third of the size of the current 24-GHz ones), higher permitted transmit power, and, most importantly, wider available bandwidth, which enables higher object resolution. As a result, advances in radar modulation techniques, antenna beam steering, system architecture, and semiconductor technology are driving the rapid adoption of millimeter-wave radar in future ADAS-enabled cars and trucks.
To manage the adoption of these technologies, radar developers require RF-aware system-design software that supports radar simulations with detailed analysis of RF front-end components, including nonlinear RF chains, advanced antenna design, and channel modeling. Co-simulation with circuit and electromagnetic (EM) analysis provides an accurate representation of true system performance prior to building and testing costly radar prototypes.
NI AWR software provides these capabilities, all within a platform that manages automotive radar product development—from initial architecture and modulation studies through the physical design of the antenna array and front-end electronics based on either III-V or silicon integrated-circuit (IC) technologies.
The NI AWR Design Environment platform integrates these critical radar simulation technologies while providing the necessary automation to assist the engineering team with the very complex task of managing the physical and electrical design data associated with ADAS electronics. ADAS support includes:
- Design of waveforms, baseband signal processing, and parameter estimation for radar systems, with specific analyses for radar measurements along with comprehensive behavioral models for RF components and signal processing.
- Design of transceiver RF/microwave front-end with circuit-level analyses and modeling (distributed transmission lines and active and passive devices) to address printed circuit board (PCB) and monolithic-microwave-integrated-circuit (MMIC)/RF integrated-circuit (RFIC) design.
- Planar/3D EM analysis for characterizing the electrical behavior of passive structures, complex interconnects, and housings, as well as antennas and antenna arrays.
- The connection between simulation software and test and measurement instruments.
Radar Architectures and Modulation
For adaptive cruise control (ACC), simultaneous target range and velocity measurements require both high resolution and accuracy to manage multi-target scenarios such as highway traffic. Future developments targeting safety applications like collision avoidance (CA) or autonomous driving (AD) call for even greater reliability (extreme low false-alarm rates) and significantly faster reaction times compared to current ACC systems, which utilize relatively well-known waveforms with long measurement times (50-100 ms).
Important requirements for automotive radar systems include the maximum range of approximately 200 m for ACC, a range resolution of about 1 m, and a velocity resolution of 2.5 km/h. To meet all these system requirements, various waveform modulation techniques and architectures have been implemented, including a continuous wave (CW) transmit signal or a classical pulsed waveform with ultra-short pulse length.
The main advantages of CW radar systems in comparison with pulsed waveforms are the relatively low measurement time and computation complexity for a fixed high-range resolution system requirement. The two classes of CW waveforms widely reported in literature include linear-frequency modulation (LFMCW) and frequency-shift-keying (FSK), which use at least two different discrete transmit frequencies. The table compares the different radar architectures and their advantages and disadvantages.
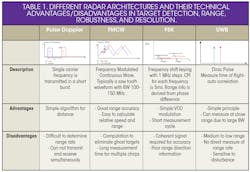
For ACC applications, simultaneous range and relative velocity are of the utmost importance. While LFMCW and FSK fulfill these requirements, LFMCW needs multiple measurement cycles and mathematical solution algorithms to solve ambiguities, while FSK lacks in terms of range resolution. As a result, a technique combining LFMCW and FSK into a single waveform called multiple-frequency-shift-keying (MFSK) is of considerable interest. MFSK was specifically developed to serve radar development for automotive applications and consists of two or more transmit frequencies with an intertwined frequency shift and with a certain bandwidth and duration (Fig. 2).1
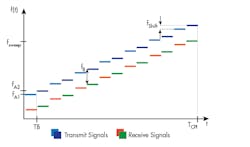
2. This is a simple illustration of MFSK.
As previously mentioned, pulsed radars are also widely used in automotive radar systems. Relative velocity can be determined from consecutive pulses using a coherent transmitter and receiver to measure pulse-to-pulse phase variations containing the Doppler frequency that conveys relative velocity. For a pulsed-Doppler (PD) radar, range is still measured by signal propagation time. To measure both range and relative velocity, the pulse-repetition frequency (PRF) is an important parameter.
There are many tradeoffs to be considered when deciding which architecture and waveform modulation technology delivers the necessary performance while maintaining development and production cost goals. These requirements can be met with NI AWR Design Environment, specifically Visual System Simulator (VSS) system design software that is dedicated to RF system design and implementation. It offers a toolbox of commonly called-for simulation technologies and radio block/signal processing models, along with support for user-developed coding.
VSS is an RF and wireless communications and radar systems design solution that provides the simulation and detailed modeling of RF and digital signal processing (DSP) components necessary to accurately represent the signal generation, transmission, antenna, T/R switching, clutter, noise, jamming, receiving, signal processing, and channel-model design challenges and analysis requirements for today’s advanced radar systems.
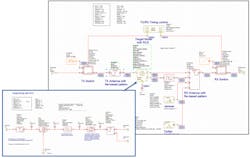
Figure 3 shows a VSS workspace example that demonstrates a possible ACC radar architecture, modulation scheme, channel modeling, and measurement configuration. This workspace includes a pulse-Doppler (PD) radar system design with signal generator, RF transmitter, antenna, clutters, RF receiver, moving target detection (MTD), constant false alarm rate (CFAR) processor, and signal detector for simulation purposes.
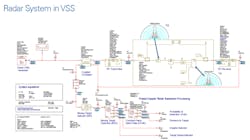
3. Shown is a pulsed-Doppler radar system design created with VSS software.
The chirp signal level is set to 0 dBm, with a PRF of 2 kHz and duty cycle of 25%. The target model is defined by the Doppler frequency offset and target distance. Angles of arrival (THETA/PHI) are specified in a data file and vary over time. The Doppler frequency and channel delay were generated to describe the target return signal with different velocities and distance, while the radar clutter model can be included and the power spectrum can be shaped. In this example, the clutter magnitude distribution was set to Rayleigh and the clutter power spectrum was formed by a Weibull probability distribution.
Figure 4 shows an RF transmitter that includes oscillators, mixers, amplifiers, and filters. Gain, bandwidth, and carrier frequency were specified based on the requirements of the system or actual hardware performance as provided by the RF design team. Likewise, the RF receiver includes oscillators, mixers, amplifiers, and filters. Gain, bandwidth, and carrier frequency were specified according to the system requirements.

4. This RF transmitter block is based on a sub-circuit that contains filtering, amplification, and frequency conversion.
Co-simulation with the circuit simulator Microwave Office is possible as the transceiver front-end design details become available. As will be discussed later, the interaction between the transceiver electronics and a beamforming antenna array can be analyzed via circuit, system, and EM co-simulation.
MTD is used to detect the moving object more effectively. The MTD is based on a high-performance signal-processing algorithm for PD radar. A bank of Doppler filters or FFT operators cover all possible expected target Doppler shifts and the output of the MTD is used for the CFAR processing. In this particular example, measurements for detection rate and CFAR are provided.
The radar-signal waveform must be measured in the time domain at the receiver input. Since the target return signal is often blocked by clutter, jamming, and noise, detection in the time domain is not possible and an MTD is used to perform the Doppler and range detection in the frequency domain. In the MTD model, the data is grouped for corresponding target range and Doppler frequency. Afterwards, a CFAR processor is used to set the decision threshold based on the required probabilities of detection and false alarm (Fig. 5).
5. The sub-circuit defines transmit and receive antennas, channel, and target with swept distance to radar (includes modeling of ground clutter).
This relatively simple design can be used as a template for different PD applications. The radar signal is a function of PRF, power, and pulse width (duty cycle). These parameters can be modified for different cases. In the simulation, the radar signal also can be replaced by any defined signal through the data file reader in which the recorded or other custom data can be easily used. VSS provides the simulation and modeling capabilities to refine the radar architecture, implement increasingly accurate channel models (including multi-path fading and ground clutter), and develop performance specifications for the transceiver link budget and detailed antenna radiation pattern requirements.
The plots in Fig. 6 show several simulation results, including the transmitted and received chirp waveform, the antenna radiation pattern, and several system measurements, including the relative velocity and distance. In this simulation, the distance to the target is swept to reflect a vehicle that approaches and passes by a stationary radar, resulting in Doppler frequency that reverses the sign from negative to positive (red curve) and produces a null in relative distance as the target passes by the radar. In an automotive radar for ACC, the velocity and distance information would be used to alert the driver or take corrective action (such as applying braking).
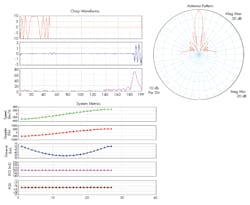
6. The results of the simulation are shown in the system metrics graph.
References
1. Rohling, Hermann; Meinecke, Marc-Michael, “Waveform Design Principles for Automotive Radar Systems,” Technical University of Hamburg-Harburg/Germany, Conference: Radar, 2001 CIE International Conference on, Proceedings /react-text.
About the Author
Dr. Milton Lien
Dr. Milton (Chun-Hsien) Lien is currently a regional technical manager for AWR Group, NI. Before joining AWR, he was a technical applications manager with Advanced Communication Engineering Solution Co. Ltd, Hsinchu, Taiwan. He received the B.S. degree in communication engineering from National Chiao Tung University, Hsinchu, Taiwan, in 1998, and a Ph.D. degree in communication engineering from National Taiwan University, Taipei, Taiwan, in 2009. His research interests include the design and analysis of RF, microwave and MMW circuits, Signal Integrity, EMI and computational electromagnetic.
David Vye
Technical Marketing Director, Cadence
David Vye is the senior product marketing manager for AWR software at Cadence, where he’s responsible for product messaging and positioning in the RF/microwave market. A former editor and business development manager for Microwave Journal, David has held a number of technical and marketing positions throughout the RF/microwave industry. He holds a BSEE from the University of Massachusetts at Dartmouth, with a concentration in microwave engineering.
