Refine Industrial IoT Reliability Through Precise Timing
What you'll learn:
- The importance of synchronization in networking.
- Timing devices and their technology.
- A practical example of IIoT in factory automation.

Timing is a key issue for the industrial Internet of Things (IIoT). To ensure reliable operation and communication for industrial equipment, stable timing under harsh conditions is a must to provide low latency and low jitter.
Factory automation and IIoT applications require deterministic communication, where data has to be delivered reliably and at precisely defined times. Robots, programmable logic controllers (PLCs), machine-vision systems, sensors, servo drives, autonomous guided vehicles (AGVs), and edge AI computing platforms continuously exchange time-critical information (Fig. 1).

As Industry 4.0 systems become increasingly interconnected, minimizing latency and jitter is essential for maintaining deterministic communication and precise time synchronization. The long-term performance of timing devices, including crystal oscillators and real-time clocks, is fundamental to ensuring that industrial networks and IIoT systems operate reliably, accurately, and in coordination with one another.
In these harsh industrial environments, synchronization is often more important than raw network speed. Devices must not only exchange data quickly, but also maintain a common understanding of exactly when events occur.
For example, in an automated production cell where a PLC issues a motion command to a robot, a servo drive executes the movement, a machine-vision system verifies the robot’s position, and an AI processor analyzes inspection results in real-time. Each step relies on accurate timestamps to ensure that all devices operate from the same view of the physical process.
If the clocks of these devices aren’t synchronized, data could still be delivered successfully, but it may represent different moments in time. As a result, control decisions may be based on outdated or inconsistent information, leading to reduced accuracy, lower product quality, or even operational failures. In highly automated manufacturing environments, even minor timing discrepancies can accumulate and disrupt the coordination of multiple machines and processes.
Synchronization and Networking
For those scenarios, a key technology is time-sensitive networking (TSN). This is a set of IEEE standards that extend standard Ethernet to deliver highly precise, time-guaranteed, and reliable data transfers.
At a high level, TSN works through three coordinated functions. First, all devices on the network share a common time reference through precise clock synchronization. Second, the network manages traffic according to the timing and performance requirements of different applications. Third, switches, bridges, and end devices enforce these schedules to ensure that critical data is delivered within a predictable and guaranteed time window.
TSN adds capabilities such as network-wide clock synchronization, scheduled traffic transmission, traffic prioritization for critical control data, guaranteed bandwidth allocation, bounded latency, and enhanced reliability through redundancy mechanisms. By providing a shared understanding of time across the entire network, TSN enables industrial devices and IIoT systems to coordinate actions with microsecond-level precision, providing precise, network-wide time synchronization.
Establishing a common time reference across the entire industrial network is key to ensuring that devices can coordinate actions, correlate events, and make control decisions based on a shared timeline. This common sense of time is fundamental to achieving deterministic communication, real-time control, and reliable operation.
A control system can typically compensate for a fixed and predictable delay. However, when the delay continuously changes, maintaining precise synchronization and deterministic operation becomes significantly more difficult.
Latency and Jitter: Keys to Timing-Device Precision
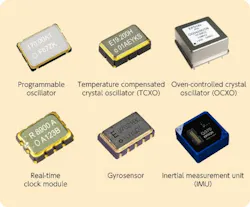
The importance of latency and jitter extends beyond the network itself to the timing devices that establish and maintain system time, such as crystal units, crystal oscillators, and real-time clocks (RTCs). These devices provide the timing reference used by controllers, sensors, communication interfaces, and synchronization protocols (Fig. 2).
Any timing uncertainty can propagate throughout the system, affecting communication accuracy and coordinated machine operation. Timing variations could introduce position errors, path deviations, degraded motion accuracy, and synchronization errors.
In motion-control systems, jitter can affect servo loop stability, multi-axis synchronization, velocity control, and contouring accuracy. Machine-vision systems rely on precise timing to capture images at the correct moment; timing variations may result in motion blur, inaccurate inspection results, and reduced defect detection performance.
Similarly, mobile robots depend on synchronized sensor data from cameras, LiDAR, and inertial sensors. Excessive jitter can degrade sensor fusion, localization accuracy, and navigation decisions.
Industrial automation equipment is also typically expected to operate continuously for 10 to 20 years or more. As a result, timing devices must maintain stable performance not only under changing environmental conditions, but also throughout many years of continuous operation. Long-term aging effects can gradually alter oscillator frequency characteristics, making long-term stability an important consideration in industrial system design.
The amount of frequency-drift specification requirements can vary significantly depending on the application, system architecture, control requirements, and overall network design. Different factory automation and IIoT applications, such as motion control, machine vision, robotics, industrial Ethernet communication, and sensor synchronization, may have different timing requirements and tolerance levels. Therefore, it’s difficult to define a single drift specification that applies universally to all industrial systems.
Instead of specifying a typical drift requirement for factory automation systems, it’s more appropriate to consider the general performance characteristics of commonly used timing devices. Standard crystal oscillators are typically specified with frequency stability ranging from approximately ±25 to ±100 ppm (parts per million) from the nominal frequency over their operating temperature range.
For more demanding applications, designers often select temperature-compensated crystal oscillators (TCXOs) or other compensated timing solutions that can reduce frequency variation to single-digit ppm levels. In applications that require even tighter timing for increased accuracy and synchronization performance, networking-specific TCXOs with frequency stability of less than 1 ppm over a specified temperature range may be used.
To put these values into perspective, a frequency error of 1 ppm corresponds to approximately 1 µs of timing error accumulated per second. A 10-ppm frequency error corresponds to approximately 10 µs per second, while a 100-ppm frequency error corresponds to approximately 100 µs per second. Although these values may appear small, timing errors can accumulate over time and become significant in applications that depend on precise synchronization and deterministic communication.
Even when TSN networks continuously synchronize clocks across the network, oscillator stability remains a critical factor because it determines how much clock correction is required between synchronization updates. A more stable oscillator accumulates less timing error over time, reducing synchronization adjustments and helping maintain more accurate and consistent timing throughout the system.
Industrial automation equipment is often required to operate reliably across a wide temperature range. Depending on the application and installation environment, operating temperature requirements commonly extend from −40 to +105°C. For harsher industrial environments, including outdoor installations, transportation systems, heavy industrial equipment, and other demanding applications, operating temperature requirements may extend to −40 to +125°C.
Because the timing devices must maintain stable performance throughout these temperature ranges, temperature stability is an important consideration when selecting crystal units, crystal oscillators, and other timing solutions for industrial applications. Even small timing variations can affect servo performance, multi-axis coordination, robot positioning accuracy, and overall machine behavior.
In addition, network timing inconsistencies can make it more difficult to guarantee predictable communication performance for motion control and real-time automation applications.
Types of Timing Devices
The design of the crystal units, crystal oscillators, TCXOs, voltage-controlled crystal oscillators (VCXOs), and even oven-controlled crystal oscillators (OCXOs) with a few ppb (parts per billion) stability level can minimize timing uncertainty. Thus, they’re able to provide accurate clock generation for TSN synchronization, industrial Ethernet communication, and motion-control applications.
Designing and controlling the development and process for these timing elements and oscillation ICs makes it possible to optimize the design of the components for the different applications. Growing a crystal allows the purity of the structure to optimize the performance, while the crystal can be sliced in different ways to provide specific frequency ranges and temperature stability. The oscillation IC is designed to work with the crystal and the packaging to offer the various levels of performance required by the application.
A practical example of IIoT in factory automation can be found in a robotic pick-and-place station. In this environment, an industrial robot operates in close coordination with a PLC, a high-speed machine-vision camera, an edge AI processor, and a conveyor encoder. As components move along the conveyor, the camera continuously captures images of each part, while the conveyor encoder provides precise position and motion information. The edge AI processor analyzes the images in real-time to determine the exact position and orientation of the moving parts.
Based on this information, the PLC calculates any required motion adjustments and immediately transmits updated commands to the robot. At the same time, the robot arm receives control instructions from the PLC while simultaneously receiving feedback from the machine-vision system. This enables the robot to accurately locate, track, pick, and place moving parts with a high degree of precision.
To maintain production accuracy, product quality, and manufacturing throughput, image acquisition, AI processing, PLC decision-making, and robot motion control must all be completed within a very short period. Any significant communication delay or timing variation can affect the coordination between devices and reduce overall system performance.
This type of tightly synchronized operation illustrates why modern factory automation systems depend on deterministic networking and precise time synchronization. Industrial IoT devices must exchange time-critical information with minimal latency and jitter to ensure that every component within the production cell operates according to a common timeline and can respond to changing conditions in real-time.
When network timing drifts, devices within the automation system no longer operate from the same time reference. In a robotic pick-and-place application, for instance, the machine-vision camera may capture an image slightly before or after the part reaches its intended position on the conveyor. The AI system then analyzes an image that no longer accurately represents the part’s actual location. Based on this outdated information, the PLC may calculate incorrect motion corrections, causing the robot to move toward the wrong position.
Impact of Time Synchronization Loss
As timing errors accumulate, the entire production process can become less accurate and less efficient. The consequences may include part placement errors, increased scrap rates, reduced production throughput, and a greater need for system recalibration and maintenance. This example highlights why precise time synchronization is essential in industrial IoT and factory automation environments, where multiple devices must coordinate actions based on a common and highly accurate sense of time.
When synchronization is lost, devices within the automation system no longer share a common and accurate time reference. As a result, timestamps generated by the machine-vision camera may become unreliable, making it difficult to determine precisely when an image was captured. At the same time, the PLC may operate using inconsistent timing information, while the robot and conveyor system may no longer maintain accurate positional alignment.
As these timing discrepancies accumulate, coordination among the various devices in the production cell begins to break down. Data collected from sensors, cameras, and controllers may no longer correspond to the same point in time, increasing the risk of incorrect control decisions and operational errors. This loss of synchronization can significantly affect production accuracy, process reliability, and overall system performance.
Timing devices support precise camera synchronization, stable trigger timing, accurate encoder correlation, and reliable timing coordination between cameras, AI processors, PLCs, robot controllers, and industrial Ethernet interfaces. Minimizing timing uncertainty throughout the inspection process helps improve image consistency, inspection accuracy, and AI inference reliability.
Each timing technology addresses different application requirements. TCXOs provide improved frequency stability across wide temperature ranges, VCXOs enable fine frequency adjustment and synchronization within communication and timing-control systems, and OCXOs deliver high frequency stability for applications requiring the highest levels of synchronization accuracy and timing performance.
As TSN-enabled industrial networks become increasingly interconnected, the most appropriate timing solution must be based on the synchronization, stability, environmental, and system-level performance requirements.
About the Author

Jonny Lee
Product Marketing Manager, Epson
Jonny Lee is a Product Marketing Manager at Epson. Before joining Epson, he worked in the semiconductor industry, focusing on embedded system applications. With deep expertise in quartz-based timing devices and their diverse applications, Jonny has helped customers in optimizing their system designs and selecting the best crystal products for their needs.
