Driving Safely with Automotive Radar Systems

Automotive electronic devices are making driving safer, with or without a hand on the steering wheel. Application of a technology long associated with the battlefield—radar—within modern advanced driver-assistance systems (ADAS) is helping to warn drivers of potential accidents by electronically looking ahead, behind, and around corners. Thanks to advanced mixed-signal semiconductors, such automotive radars can be built affordably and reliably into compact modules, taking advantage of available frequency spectrum at 24 and 77 GHz to become part of safer driving experiences.
Radar is just one component within ADAS, but an important ingredient in modern vehicular electronic safety support solutions. Other such systems include light detection and ranging (LiDAR) sensors, infrared (IR) sensors for night-vision systems, ultrasonic sensors for parking assistance and reverse warnings, high-definition (HD) cameras for lane-departure warnings, and parking-assist cameras.
Within an ADAS, a high-power central processing unit (CPU) or field-programmable gate array (FPGA) works with the data from the different sensors to provide vehicle-control corrections, such as collision warning and avoidance to prevent a vehicle from accelerating into the vehicle ahead of it or a pedestrian in front of it. When equipped with enough information and a suitable vehicle-control architecture, an ADAS can form the core of an autonomous “self-driving” vehicle, a much more advanced version of the “cruise control” systems offered as options in commercial vehicles starting in the early 1960s.
Three types of radar are incorporated within an ADAS-equipped vehicle: short-range radar (SRR) for detecting objects about 1 to 20 m from a vehicle, including for blind-spot detection (BSD) and lane-change assistance (LCA); medium-range radar (MRR) for detection of objects from 1 to 60 m; and long-range radar (LRR) for detecting objects at distances to 250 m.
Automotive radar sensors are mounted for detection of objects to the front, rear, and sides of a vehicle (Fig. 1). Both pulse-Doppler and continuous-wave frequency-modulated continuous-wave (FMCW) radar technologies can serve ADAS applications at 24 or 77 GHz, although 24-GHz systems are being phased out by 2022 in favor of 77-GHz automotive radar systems. With wavelengths that are one-third the size of 24-GHz systems, 77-GHz radars make it possible to use smaller antennas and other components while still achieving greater detection range with higher resolution than 24-GHz systems.

1. Multiple radar sensors will be part of rapidly advancing vehicular electronic safety systems, which will also include cameras and optical sensors. (Courtesy of Texas Instruments)
Pulse-Doppler radar architectures follow a traditional pulsed radar approach, in which a short pulse with high peak power is transmitted across an area of interest for a short period of time—the pulse repetition interval (PRI). These are half-duplex systems in which the receiver is activated after pulses are transmitted and the transmitter is shut off. The receiver measures the time of arrival (TOA) or the time for pulses reflecting off a target to return. The delay of these echo pulses provides insight into the distance of the target from the radar transmitter.
By knowing the pulse repetition frequency (PRF) and coherently measuring the phase shifts of multiple pulses, it’s possible to determine the relative velocity of an illuminated object. Pulse-Doppler radars can detect targets over long distances and with high resolution using a single antenna to transmit and receive. However, they require high peak transmit power. Because of the “blind zone” in detection that occurs when switching between transmit and receive modes, pulse-Doppler radars are better suited for long-range applications (where there’s some recovery time) rather than medium- or short-range applications.
FMCW Radar
An alternative approach to pulse-Doppler radar is the use of FMCW methods for automotive radars. Such approaches transmit and receive continuously with signals that change frequency with time when swept across a portion of frequency bandwidth. The CW signals emitted by these systems are known as “chirps,” with frequency increasing linearly with time. A radar chirp can be characterized by its start frequency, bandwidth, and duration. The rate at which the chirp increases in frequency is its slope, such as 10 MHz/s. In an FMCW radar system, separate antennas are used to prevent transmitted signals from interfering with the radar receiver’s reception of echo signals.
By combining the transmitted chirp with received echo signals in an RF/microwave frequency mixer, an intermediate-frequency (IF) signal will result that’s the difference between the transmitted and echo signals. With no change in frequency between the transmitted and received signals fed to a frequency mixer, the resulting difference or IF signal would be zero.
But, because the reflected signals exhibit some delays in their time of flight compared to the emitted chirps, there’s a change in frequency of the reflected chirps. The IF represents that change in frequency as a function of distance to an object causing the reflection: the IF increases as the target moves further from the radar transmitter. By processing the IF signals via a high-speed analog-to-digital converter (ADC) and other digital hardware and software, it’s possible to determine the distance and velocity of the objects reflecting the chirps back to the receiver.
The performance of different components within an FMCW radar system contribute to the overall system performance. The sensitivity of the radar receiver, for example, will determine the maximum detection range for a given FMCW radar transmit power level, which is aided by transmit antenna gain. Receive antenna gain will also work with receiver sensitivity to help determine maximum radar detection range. Since the IF signal’s frequency is related to maximum detection range, the capability to process higher IFs will also make possible longer maximum detection ranges. An ADC with high sampling rates that can process high IFs will support an FMCW radar system with long detection range.
The frequency of an FMCW radar isn’t critical in establishing its target resolution or capability to differentiate closely located objects. Rather, it’s the bandwidth of a swept-frequency chirp that determines radar resolution, with wider bandwidths enabling higher resolution. Since phase is more sensitive than frequency to changes in a target’s position, the use of phase rather than frequency in the analysis of FMCW radar returns can provide much higher resolution when differentiating multiple objects or targets. High resolution is possible by using the cosine of the phase difference between the radiated signal and the echo signal to determine target range and position.
Detecting objects moving at high velocities, such as high-speed traffic, requires radar system measurements made with closely spaced chirps. A frame is a series of multiple, equally spaced chirps that’s used to measure the velocities of two or more objects at the same distance from the radar but moving at different speeds. The radar’s capability to resolve the velocities of the different objects is inversely proportional to the frame time.
Beamwidth is another important radar performance parameter, with signal beams formed by two or more transmit antennas per radar system. Beamwidth combined with radar range determines a vehicular radar system’s field of view, or how far and wide it can detect objects beyond the vehicle.
Measured in angular degrees for each system, the 3-dB beamwidth differs for each type of radar. LRRs have the narrowest beamwidths while SRRs, detecting objects close to a vehicle (e.g., parking assistance), have the widest beamwidths, as measured in both azimuth and elevation. Multiple receive antennas are also important in a vehicular radar system, for angle-of-arrival (AoA) measurements of detected objects. The spacing between the antennas determines the maximum field of view for detecting reflected signals, with the spacing set as a fraction of wavelength, such as ƛ/2 or ƛ/4, and the spacing growing smaller with increasing frequency. This allows for smaller radar system components at higher frequencies.
Higher in Frequency
Since bandwidth is a critical requirement for radar systems, and available unlicensed frequency spectrum is limited at already occupied lower frequencies, vehicular radar systems are designed for use beyond the traditional 2- to 18-GHz range of military radar systems at 24 and 77 GHz.
These higher frequencies with their short wavelengths actually suffer less propagation losses due to rainfall and dust than lower frequencies with their longer wavelengths. Furthermore, the short wavelengths enable the use of automotive radar components, such as radar sensors/transceivers and antennas, with smaller dimensions for ease of mounting and concealment in a vehicle. For vehicular applications, the smaller wavelengths at 77 GHz are also more resistant to the effects of vibration in a moving vehicle than at 24 GHz, which helps with detection accuracy.
In need of bandwidth for both narrowband (NB) and ultrawideband (UWB) automotive radar applications, the Federal Communications Commission (FCC) in the late 1990s and early 2000s initially denoted frequency spectrum centered around 24 and 77 GHz for automotive radar systems in the U.S. The 24-GHz band contains a NB segment with 250-MHz of unlicensed industrial, scientific, and medical (ISM) bandwidth from 24.00 to 24.25 GHz; the UWB segment contains 5 GHz of bandwidth from 21.5 to 26.5 GHz.
Still, the need existed for a more unified international vehicular radar frequency operating range. With international groups such as the European Union (EU) and the European Telecommunications Standards Institute (ETSI) already targeting 77 GHz for automotive radar use, the 77-GHz band was also set aside by the FCC for vehicular and other radar applications, such as fixed and mobile airport radar for foreign object detection (FOD). Such applications, because of their potential to act as interference for vehicular radars, were not permitted outside of airport areas, though.
The 77-GHz band actually includes portions of a total 5-GHz bandwidth from 76 to 81 GHz. LRR occupies 600 MHz within the 76- to 77-GHz range, MRR operates within a 600-MHz bandwidth from 77 to 81 GHz, and swept-frequency SRR applications have access to the total 4-GHz bandwidth from 77 to 81 GHz.
Compared to 24 GHz, vehicular radars at 77 GHz offer longer-range object detection with high resolution for LRRs, and they have enough bandwidth to support high resolution for SRRs. An SRR with 1-GHz bandwidth from 76 to 77 GHz provides about 0.5-m resolution while an SRR with 4-GHz bandwidth from 77 to 81 GHz offers about 0.1-m resolution.
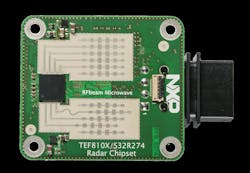
2. Radar transceivers/sensors are moving to 77 GHz, with devices available from many suppliers in chip form or as full-featured modules, such as the one shown here. (Courtesy of NXP Semiconductors)
The availability of such wide bandwidth at 77 GHz, as well as changes being made by regulatory agencies like the FCC for the use of bandwidth at 24 GHz, have encouraged vehicular radar component manufacturers to move from 24 GHz to 77 GHz (Fig. 2). The 24-GHz frequency range is not available for UWB (5-GHz bandwidth) radar applications beyond 2022 as mandated by the FCC for the U.S., only for NB (250-MHz bandwidth from 24.00 to 24.25 GHz) radar applications such as LRR systems.
The high costs of fabricating miniature components at mmWave frequencies (30 to 300 GHz) has traditionally limited their use to military and aerospace applications. But improvements in semiconductor and monolithic-microwave-integrated-circuit (MMIC) technologies, using silicon-germanium (SiGe) substrates for BiCMOS and RFCMOS processes that enable integration of mixed-signal mmWave and digital-signal-processing (DSP) components, along with advances in microelectromechanical systems (MEMS) devices, have made miniature 77-GHz radar sensors practical enough for use in most new vehicles (Fig. 3).
3. This chip-sized radar IC is an example of how miniaturized these systems are becoming. (Courtesy of NXP Semiconductors)
Simulation Plays a Key Role
Modeling software and mmWave test equipment are important tools in effectively applying radar sensors within an ADAS vehicular application. Modern electromagnetic (EM) simulation software provides the means to model antennas, beamforming networks, and other active and passive components used in all three types of vehicular radars. It also offers a way to study signal propagation at 24 and 77 GHz under different modeled operating conditions. Such analysis can be useful in developing the different algorithms required by a vehicular CPU for “sensor fusion” or combining different data from the various sensors within an ADAS-equipped automobile.
For example, radar sensors that function as part of a vehicle coordinate system (VCS) detect the range, speed, and azimuth of other vehicles, relying on the precise alignment of the radar sensors within the vehicle performing the measurements. By performing an alignment procedure, any misalignment angle can be calculated based on the radar sensor’s position on the vehicle, the speed of the vehicle, and the pointing angle of the radar.
Reducing measurement time as much as possible will be instrumental in bringing affordable ADAS vehicles to market. In the U.S., radar-equipped vehicles will be subject to FCC Part 95 rules and regulations for certification, calling for an extensive series of measurements on RF/microwave performance and emissions levels. Fortunately, RF/microwave test equipment, including test signal sources and analyzers, have been steadily moving higher in frequency over the last several decades. Thus, they now provide the means to generate and analyze both pulsed and chirped mmWave signals to 81 GHz and beyond (as might be needed for harmonic and spurious signal detection).

About the Author
Jack Browne
Technical Contributor
Jack Browne, Technical Contributor, has worked in technical publishing for over 30 years. He managed the content and production of three technical journals while at the American Institute of Physics, including Medical Physics and the Journal of Vacuum Science & Technology. He has been a Publisher and Editor for Penton Media, started the firm’s Wireless Symposium & Exhibition trade show in 1993, and currently serves as Technical Contributor for that company's Microwaves & RF magazine. Browne, who holds a BS in Mathematics from City College of New York and BA degrees in English and Philosophy from Fordham University, is a member of the IEEE.
