Algorithms to Antennas: Develop and Test Algorithms on Commercial Radars—Moving from Simulation to Hardware

In a previous blog, we reviewed a workflow that be used to classify radar micro-Doppler signatures from pedestrians and bicyclists via deep-learning techniques. In another blog, we showed ways you can implement a virtual array to increase angular resolution in multiple-input, multiple-output (MIMO) radars. In both examples, we modeled a radar system and a set of scenarios to test the algorithms we developed. Either one is a great application to try out on commercially available radars, which brings us to our current blog topic.
Here, we shed light on a workflow that can be used to connect to software-defined radars in MATLAB. There are many ways to connect radars to MATLAB, but we will focus on the Ancortek radars because of the range of frequency bands available (2.4 GHz, 6 GHz, 10 GHz, 24 GHz, and 77 GHz), the multiple antenna and array front-end options, and the direct connectivity of these systems to MATLAB.
All of the previous blogs focused on modeling and simulation frameworks to help accelerate algorithm development. One of the goals is to make it easy for engineers to try algorithms before building their systems. When a radar can be used to collect data, you can move to the next stage in a project with confidence that the algorithms are effective. Along these same lines, commercially available radars provide a head start in working with hardware at the earliest stages of the project.
At the virtual IEEE International Radar Conference in May 2020, we presented how we tested the deep-learning network, previously described in this blog, with data collected from an Ancortek radar in a test setup shown in Figure 1. The network was trained completely with synthesized data, and the network was able to recognize pedestrians in the radar field of view based on micro-Doppler signatures. Even though the radars made it easy to collect data, it would have been quite a challenge to collect the same amount of datasets that we simulated in the network training process.

Another example, described in an earlier blog, related to increasing angular resolution with MIMO radars—this was shown at the conference as well. In Figure 2, you can see the setup using the hardware. The targets consist of two corner reflectors separated by 25 degrees.
The plot on the bottom left of Figure 2 shows the results of range-angle processing without using a virtual array to increase angular resolution. Here, the two reflectors look like a single object. The plot on the bottom right of Figure 2 shows the results of creating a virtual array. Note the two reflectors are resolved in angle. The MIMO operations are possible on the radar because the transmitter array is spaced appropriately, and we have control of when individual array elements transmit. The receive elements also provide spatial awareness.

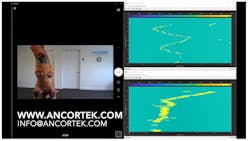
One more example we want to highlight from the conference is shown in Figure 3. In this case, instead of corner reflectors or pedestrians, the radar detects a dancing dinosaur. The display on the top right shows the detected range over time and the display on the bottom right shows angle over time. Both examples show how the phased array as the front end of the receiver enables beamforming and direction of arrival (click here for the full video).
To learn more about the topics covered in this blog, see the examples below or email me at [email protected]:
- Increasing Angular Resolution with MIMO Radars (example): Learn how forming a virtual array in MIMO radars can help increase angular resolution. Understand how to simulate a coherent MIMO radar signal-processing chain.
- Pedestrian and Bicyclist Classification Using Deep Learning (example): Learn to classify pedestrians and bicyclists based on their micro-Doppler characteristics using a deep-learning network and time-frequency analysis.
- The Micro-Doppler Effect in Radar, Second Edition (book): Learn about micro-Doppler effects from radar returns.
See additional 5G, radar, and EW resources, including those referenced in previous blog posts.
About the Author
Rick Gentile
Product Manager, Phased Array System Toolbox and Signal Processing Toolbox
Rick Gentile is the product manager for Phased Array System Toolbox and Signal Processing Toolbox at MathWorks. Prior to joining MathWorks, Rick was a radar systems engineer at MITRE and MIT Lincoln Laboratory, where he worked on the development of several large radar systems. Rick also was a DSP applications engineer at Analog Devices, where he led embedded processor and system level architecture definitions for high performance signal processing systems used in a wide range of applications.
He received a BS in electrical and computer engineering from the University of Massachusetts, Amherst, and an MS in electrical and computer engineering from Northeastern University, where his focus areas of study included microwave engineering, communications, and signal processing.
