Overcome mmWave Automotive Radar Testing Challenges

Download this article in PDF format.
Recent regulation changes have allowed the automotive radar market to shift from the 24-GHz band to the 77-GHz band, introducing a range of new design and test challenges. Higher frequencies facilitate wider bandwidths and increasing resolution, while the shorter wavelengths provide smaller form factors and improved range enabled by a relaxation of the maximum power specification in the 77-GHz band. Better resolution, smaller size, and longer range mean that radar is rapidly becoming the sensor of choice for advanced driver-assistance systems (ADAS) and autonomous-vehicle applications.
This frequency shift, combined with the proliferation of sensors on vehicles, will drive a compound annual growth of 21% (CAGR) during the 2018 to 2022 timeframe, according to a recent market research report by Technavio.
Today, the modulation of choice for an automotive radar is linear frequency modulation (LFM) or frequency-modulated-continuous-wave (FMCW) radar. This type of modulation, often called “chirp,” has roots that go back to the Cold War when electronic-warfare officers could often identify adversary radar by listening to the audio of the radar modulation. Different radar signatures would sound like different birds “chirping.” Wide linear frequency sweeps equate to a higher-resolution radar.
Resolution in the case of radar means that two objects close to each other can be resolved—for example, being able to see the difference between a person standing near a lamp post, or two cars driving at the same speed very close together. In pulsed radar, shorter duration pulses provide better resolution. However, a short pulse is very hard to amplify.
LFM is a way to overcome this problem. It’s essentially a process of linearly increasing the frequency around a carrier. For example, if a center frequency is 77 GHz, a 4-GHz chirp—or LFM—effectively means linearly sweeping an RF carrier wave from 75 to 79 GHz in about 100 µs. The receiver “stacks” each element of the chirp by filtering and delaying the energy to create the equivalent of a very narrow pulse.
At 24 GHz, the maximum LFM is 600 MHz, which provides moderate range resolution and is adequate for long-range radar (LRR) applications. Because of this, it’s predominantly used for adaptive-cruise-control applications. The new bands open up much higher bandwidths, enabling radar to be used for both LRR with chirps up to 1 GHz and short-range radar (SRR) applications with chirps up to 4 GHz, significantly increasing the vehicle’s situational awareness while in motion.
As shown in Figure 1, another benefit of the higher frequency is that sensor size can be smaller. Wavelength is essentially inversely proportional to frequency. Therefore, the higher the frequency, the smaller the wavelength, which means the antenna can be literally one-third the size! This reduction is particularly useful for automotive applications in which sensors need to be mounted in tight spots behind the bumper or other locations around the car. Such locations include doors and trunks for proximity applications, as well as locations inside the car for in-cabin applications.

1. Moving from the 24-GHz band to the 76- to 81-GHz band enables more capability.
Automotive Radar Technology
LFM, or FMCW, radar offers a very low-cost, compact, weather- and environment-tolerant way to get range and velocity from a target. Cost, size, and weight are key considerations for any automotive application.
In comparison to a pulsed radar employed in many military radars, FMCW radar saves considerable cost by essentially eliminating the pulse circuitry. The actual design is also relatively simple (Fig. 2). A voltage-controlled oscillator (VCO) is used to generate the linear frequency ramp that’s transmitted through the circulator. The transmit ramp is compared to the received ramp by using a mixer to subtract the two signals from each other. Post-signal processing, such as performing a fast Fourier transform (FTT) on the resultant signal, is then carried out in the processing and decision-making part of the system.

2. An FMCW radar is a relatively simple concept. Adding multiple transmit and receive channels helps create an appropriate beam width or wave front and determine angle of arrival.
However, because no time reference exists with FMCW, range is harder to calculate than with pulsed radar, in which the pulses actually provide a time reference. For stationary targets, FMCW range is determined by measuring the linear frequency difference between transmit and receive. For automotive, of course, many targets are likely to be moving. If the target is moving, the receive frequency contains both the time-delayed frequency ramp of the chirp, plus a Doppler frequency offset.
To resolve moving targets, a second measurement is needed, such as chirp up (sweep frequency from low to high) and then chirp down (sweep frequency from high to low). This enables solving two simultaneous equations and extracting the Doppler information. This approach only works if there’s a single moving target. To discriminate multiple targets, it’s necessary to add an additional chirp type (sweep at a different rate, for example). By adding a new chirp and other frequency difference measurements after the chirp up and chirp down ramp to the modulation scheme, it’s possible to solve the equations for the real targets.
Linearity is Critical
The linearity of chirp waveforms is an important performance parameter of an FMCW radar. Any nonlinearity, or frequency distortion, will distort the measurement. As low-cost circuitry is often used in safety-critical and harsh environmental conditions, the linearity of the signal must be maintained.
Figure 3 shows the measurement of linearity being accomplished using a broadband time-domain capture device like an oscilloscope. The signal is downconverted from 76 or 81 GHz using a standard downconverter with a local oscillator to provide an IF frequency of around 5 GHz. The oscilloscope demodulates the FMCW modulation and then measures the linearity of the chirp.

3. This is an FMCW linearity measurement setup.
When choosing a broadband acquisition device or oscilloscope, it's important to understand the performance of the instrument. In the example in Figure 3, the downconverter provides a 4-GHz signal that sweeps from 3 to 7 GHz. Therefore, an oscilloscope with at least 8 GHz of bandwidth or 25-Gsample/s sample rates and 8 bits of analog-to-digital converter (ADC) resolution is a good instrument. For chirps larger than 4 GHz, one may need a higher-frequency oscilloscope that can sample at 50 or 100 Gsamples/s.
The downconverter’s performance is also an important consideration. Understanding harmonic performance is key. If, for example, one chooses a downconverter with a center frequency of 3 GHz, with a chirp bandwidth of 4 GHz, the harmonics of the 1.5-to-2.5 GHz signal sweep will fall in the measurement band.
Anyone who wants to look at the spectrum will also want to have a true spectrum analyzer on hand. Low-cost USB-based spectrum analyzers with an appropriate downconverter are very capable in terms of helping one understand the performance of the downconverter and ultimately the spectral performance of the automotive radar.
Signal Simulation
Now that we’ve looked at the setup for signal analysis, let's take at what’s involved with creating the signals to accurately simulate the real-world environment.
Although radar is largely immune to atmospheric conditions, it’s important to be aware that at certain wavelengths or frequencies, the potential exists for attenuation either by oxygen molecules or water-vapor absorption. The green and blue lines in Figure 4 show where the two bands lie (24/77 GHz). There’s less atmospheric attenuation in the lower band and a bit more in the higher band. When developing LRR with a goal of obtaining maximum range, atmospheric conditions should be taken into account when testing the limits of a device.
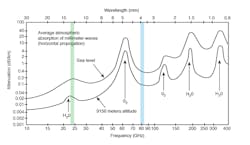
4. The green and blue bands indicate where there’s potential for weather-related attenuation.
Antenna performance is another variable. When designing the antenna system, the lobes should be kept as low as possible within the cost budget. Otherwise, false targets or clutter will be created. Various antenna patterns can be simulated with an arbitrary waveform generator (AWG). Targets also need to be recognized—not all objects are not created equally.
When considering the well-known radar range equation, one of the elements is cross-section. Needless to say, the radar cross-section of a car can be very complex, involving a variety of materials with different absorption levels, such as metals, plastic, and composites. One also needs to consider multipath—how the radar behaves in a tunnel, for example.
Part of the qualification of any radar system involves testing a radar under a number of different target scenarios. It’s another important factor that should be included in the signal simulation model built in the AWG. For radar millimeter-wave (mmWave) test applications, a capable AWG solution is needed. Among the critical requirements are:
- Appropriate signal-generation software
- Frequency range up to 81 GHz
- Bandwidth of 4 GHz or more for high-resolution LFM
- Wide dynamic range to simulate antenna patterns and multiple target classifications
- Excellent frequency linearity
- Excellent phase noise—Doppler
- Phase control to emulate beamforming
In addition, it’s often useful to be able to hook up multiple AWGs and perform different angle of arrival measurements, or to employ an AWG that has built-in multi-channel support.
The full-range scenarios that need to be created by an AWG for automotive radar are shown in Figure 5. Going down the list, we need to generate the radar cross-section and determine if an object is a car, truck, bike, or bridge street sign. Multiple velocity cases need to be emulated, such as a rapid change in velocity.
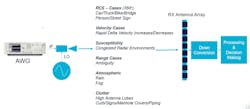
5. A capable AWG is required to simulate the complex environment facing automotive radars.
Of course, there will be other radars on the streets and it’s only going to get more congested moving forward. Therefore, we need to test for susceptibility. Another challenge is range ambiguity: Are targets close together, far way, or all clustered together? Are atmospheric conditions reducing range? Finally, for LRR, clutter can be multiple objects such as curbs, signs, or even manhole covers. For SRR, all of these may be classified as targets.
Conclusion
Radar has been in use since WWII, so it’s a tried and tested technology. With the recent move to 77 GHz, it looks well-positioned to play a significant ongoing role not only in ADAS, but also in the future of autonomous automobiles. Compared to the other sensors used in today’s automotive applications, it has several advantages.
For example, cameras are susceptible to weather and darkness, passive infrared has temperature dependence, and laser/LiDAR is computationally intensive. Radar provides excellent range and velocity measurements, is immune to most weather conditions, works in the dark and over all temperatures, and is less computationally intensive than light-based sensor systems.
The move to 77 GHz offers significant improvements in range, resolution, and antenna size, but it does introduce new test challenges and requirements. Fortunately, modern test solutions like high-bandwidth oscilloscopes and high-performance AWGs give designers the tools they need to maximize radar performance under a wide range of conditions.
Mark Elo is a senior technical manager at Tektronix. He began his career as a design engineer in Hewlett-Packard's Microwave Division in 1990 and has since held various senior management positions at Agilent Technologies, Anritsu, Gigatronics and Keithley Instruments in R&D, marketing, and business development. He has more than 25 years of test and measurement experience in microwave instrumentation.

About the Author
Mark Elo
Senior Technical Manager
Mark Elo is a senior technical manager at Tektronix. He began his career as a design engineer in Hewlett-Packard's Microwave Division in 1990 and has since held various senior management positions at Agilent Technologies, Anritsu, Gigatronics and Keithley Instruments in R&D, Marketing and Business Development. He has more than 25 years of test and measurement experience in microwave instrumentation.
