Measure The Range Of Sensor Networks
This file type includes high resolution graphics and schematics when applicable.
Wireless sensor networks (WSNs) provide invaluable services with their short-range communications capabilities. But their limited operating power can impose restrictions on the maximum allowable distance between the sensors and the base station.1,2 Due to this limitation, direct communications between a sensor and its base station is not always possible, especially in a difficult radio environment with strong attenuation. To overcome this difficulty and to extend the communications distance, multi-distributed nodes with multiple hops can be used.
A simple distributed node (node meshing) strategy for a WSN is shown in Fig. 1.
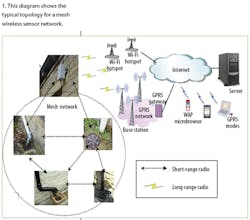
Multihop operation can be realized between sensor nodes (which are generally identical sensors) or between sensor nodes and the base station. This type of system maintains continuous connections by means of reconfigurations around blocked paths, hopping from node to node until a connection can be established with the base station.3-5 Mesh networks incorporate self-healing capability that enables reliable operation even when a node breaks down or a connection goes bad.
Figure 1 illustrates two different types of radio communication scenarios, i.e., sensor to sensor and sensor to base station or gateway. In a study of sensor communications distances under different conditions, Crossbow wireless sensors were used in the evaluation.6,7 As part of the study, sensor to sensor communications on the ground level were examined, along with sensors on ground level and a base station elevated on a lamppost. Two operating frequencies were investigated, at 900 and 2400 MHz. Measurements were performed in indoor and outdoor environments. In the case of sensor-to-base-station communications, only outdoor measurements were considered.
Two different Crossbow Technology (www.xbow.com) wireless sensor kits were programmed to operate in the 900- and 2400-MHz bands. The transmitter was programmed to maintain a counter using a 4-Hz clock and its output values was registered by light-emitting diodes (LEDs) and stored in the radio communication stack. The receiver was programmed to receive the radio signal (a counter value from the transmitter) and display the output value on its LEDs.
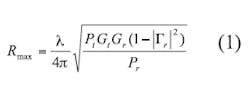
The maximum transmit output power of the Crossbow wireless sensor kit at 900 MHz was set at +5 dBm with current consumption of 25.4 mA while communicating. The maximum output power of the sensor operating at 2400 MHz was set at 0 dBm with current consumption of 17.5 mA during communications. The transmission range of the operating communication system can be predicted by using the Friis free-space formula as8:
where ? = the operating wavelength,
Pt = the power transmitted by the sensor,
Gt = the gain of the transmitting antenna,
Gr = the gain of the receiving antenna,
Pr = the receiver sensitivity, and
|Gr|2 = the reflected power coefficient of the receiving antenna.
The computed free-space transmission range at 900 MHz was found to be 300 m under the assumption of Pt = +5 dBm,8 Gt = Gr = 1.2 dBi, and Pr = -105 dBm.9 Similarly, the maximum transmission range at 2400 MHz was 64 m for similar assumptions of the variables used for 900 MHz except for Pt = 0 dBm.10
Sensor-to-sensor (STS) communications at ground level are vital when communications are blocked between a base station and ground-level sensors. Under these circumstances, STS communications plays an important role since it allows packets of information to be transferred by means of multihopping between sensors and reliably reach its destination.
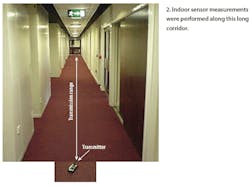
The proposed STS transmission is designed to operate reliably in indoor and outdoor environments. An experiment was carried out by fixing the location of the transmitter on the ground level and moving the receiver along the transmission path to find the maximum range. Measurements were under line-of-sight (LOS) and non-line-of-sight (NLOS) conditions.
For indoor STS communications measurements, experiments were carried out across a 45-m stretch of the Chesham Building at the University of Bradford (Fig. 2).
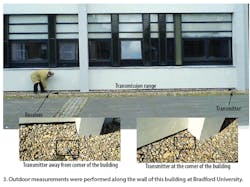
In this model, the receiver and transmitter are moved around the corner of the building in order to determine the optimum transmission range. When the receiver and transmitter were placed in the corner of the building so that the LOS path was effectively blocked, it was found that communications were greatly disturbed. Three additional ground environments were tested with stone, concrete, and grass-covered ground, as described in Figure 4 and Figure 5 respectively.
In all cases, the critical distances for lost communications were observed in both the LOS and NLOS environments.
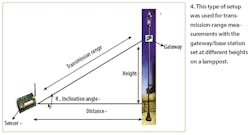
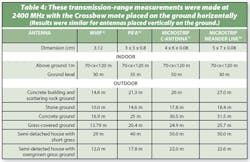
The transmission ranges of sensors to the base station were also evaluated for different operating conditions. A transmitting Crossbow sensor was tied to the top of an adjustable lamppost, with operation at two different frequencies of 900 and 2400 MHz. The lamppost was adjusted for three different heights of 3.0, 4.5, and 6.0 m above the ground, with the results shown in Table 4.
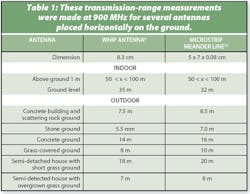
Three different antennas were evaluated as replacements for the commercial whip antennas used in these sensor networks. The performance of these antenna types were investigated as a part of this project.
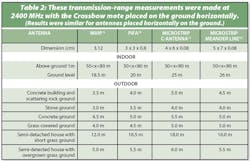
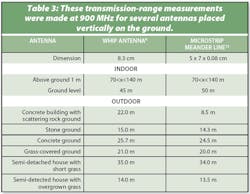
Conventional microstrip antennas will not work well when placed very close to ground level. Their signal strength is attenuated by the lossy ground, affecting the radiation efficiency and reducing the transmission range. Ideally, STS transmission range measurements are performed by placing the Crossbow mote on the ground in the horizontal position. To make sure that the proposed microstrip antennas operate in their optimum regime, the Crossbow mote was placed vertically on the ground.
Table 1, Table 2, and Table 3 summarize the performance of the Crossbow mote with different types of antennas, in term of transmission range and size of the proposed antenna, over several aforementioned environments for STS communication at 900 and 2400 MHz. A transmission range of 5.5 to 70 m can be attained for STS communications at 900 MHz when the mote or sensor is on the ground vertically or horizontally. When the sensor is elevated 1 m above the ground, the transmission range can reach 140 m in the aforementioned environments. In the case of the 2400-MHz sensors, the transmission range drops to 3 and 50 m at ground level and to 80 m when the sensors are elevated 1 m above the ground. Table 4 shows that the transmission range of STB communications is about 50 to 75 m when the receiving modules are elevated at the height of 3 to 6 m above the ground (attached to the top of a lamppost) at 900 MHz. When the same receiver operates at 2400 MHz, the transmission range is from 25 to 35 m.
REFERENCES
1. Cauligi S. Raghavendra, Krishna M. Sivalingam, and Taieb Znati, Wireless Sensor Networks, Springer-Verlag, New York, 2006.
2. A. Goldsmith, Wireless Communications, Cambridge University Press, Cambridge, England, 2005.
3. D. Geer, "User make a Beeline for ZigBee sensor Technology," Computer, vol. 33, December 2005, pp. 16-19.
4. H.C. Huang, Y.M. Huang, and J.-W. Ding, "An Implementation of Battery-aware Wireless Sensor Network Using ZigBee for Multimedia Service," International Conference on Consumer Electronics (ICCE 06) Digest of Technical Papers, pp. 369-370, January 2006.
5. A. Harney and C.O. Mahony, "Wireless Short- Range Devices: Designing a Globe License- Free System for Frequencies 6. Crossbow, Stargate Developer's Guide Rev. B. Crossbow, Sunnyvale, CA, 2006.
7. Crossbow, MPR-MIB Series User Manual 7430-0021-06_A, Crossbow, Sunnyvale, CA.
8. P.V. Nikitin and K.V.S. Rao, "Theory and Measurement of Backscattering From RFID Tags," IEEE Antennas and Propagation, vol. 48, No. 6, December 2006, pp. 212-216.
9. Chipcon, CC1000 Single-Chip Very Low Power RF Transceiver (Rev. A), Texas Instruments, U.S, 2007.
10. Chipcon, 2.4 GHz IEEE 802.15.4/ZigBee- Ready RF Transceiver (Rev. B), Texas Instruments, U.S, 2007.
11. T. H. Lee, "Dielectric resonator antenna design considerations for compact mobile handsets," M. Ph. Thesis, September 2007, University of Bradford, Bradford, United Kingdom.
12. Hai-Ming Hsiao and Jui-Han Lu, "A planar dual-meander-line antenna for multiband mobile handsets," Microwave and Optical Technology Letters, vol. 48, No. 5, May 2006, pp. 883-888.
13. C. H. See, R.A. Abd-Alhameed, and P.S. Excell, "Design of Dual-frequency planar inverted F-LAntenna (PIFLA) FOR WLAN and short-range Communication systems," in Proceedings of the 19th URSI Colloquium at Cosenor's- House, the Rutherford Appleton Laboratory, Abingdon, Oxford, UK, July 3-4, 2006.
This file type includes high resolution graphics and schematics when applicable.
