Understanding Mixers and Their Parameters
Download this article in .PDF format
A mixer is a three-port component, which performs the task of frequency conversion. Mixers translate the frequency of an input signal to a different frequency. This functionality is vital for a wide range of applications, including military radar, satellite-communications (satcom), cellular base stations, and more. Mixers are used to perform both frequency upconversion and downconversion.
In the tutorial, “Mixer Basics Primer,” Ferenc Marki and Christopher Marki explain, “Two of a mixer’s three ports serve as inputs, while the other port serves as an output port. An ideal mixer produces an output that consists of the sum and difference frequencies of its two input signals. In other words:
fout = fin1 ± fin2
The three ports of a mixer are known as the intermediate-frequency (IF), radio-frequency (RF), and local-oscillator (LO) ports. The LO port is usually an input port."
The RF and IF ports can be used interchangeably, depending on whether the mixer is being used to perform upconversion or downconversion. The LO signal is typically the strongest signal injected into a mixer. The required LO drive level is dependent on several factors, including the mixer’s configuration and device technology.
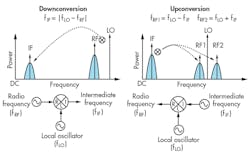
When a mixer is used to perform downconversion, an input signal enters the RF port and an LO signal enters the LO port. These two input signals produce an output signal at the IF port. The frequency of this output signal is equal to the difference of the RF input signal’s frequency and the LO signal’s frequency.
When a mixer is used to perform upconversion, an input signal enters the IF port and an LO signal enters the LO port. These two input signals produce an output signal at the RF port. The frequency of this output signal is equal to the sum of the IF input signal’s frequency and the LO signal’s frequency. Both downconversion and upconversion are shown graphically in Fig. 1. Upconversion is normally part of a transmitter, while downconversion is typically used in a receiver.
Mixer Performance Parameters
A mixer’s performance is determined by several metrics. These performance metrics are specified in most mixer datasheets. The specifications, which are described below, help a system designer select an appropriate mixer to meet system requirements.
Conversion Loss: In passive mixers, conversion loss is defined as the difference in signal level between the amplitude of the input signal and the amplitude of the desired output signal. In a mixer used for downconversion, the conversion loss is the difference between the RF input signal’s amplitude and the IF output signal’s amplitude. In a mixer used for upconversion, the conversion loss is the difference between the IF input signal’s amplitude and the RF output signal’s amplitude.
Conversion loss is expressed as a positive number in decibels. "Typical values of conversion loss can range from approximately 4.5 to 9 dB, depending on the mixer,” noted the Markis in their paper. Conversion loss values of 6 to 8 dB are common in standard double-balanced mixers, while triple-balanced mixers generally have a higher conversion loss than double-balanced mixers. It is also possible to achieve conversion gain in active mixers.
Isolation: As stated by the Markis, "Isolation is a measurement of the amount of power that leaks from one port to another. Isolation is defined as the difference in signal level between the amplitude of an input signal and the amplitude of the leaked power from that input signal to another port." When isolation is high, the amount of power leaked from one port to a different port is small.
They continue, "Three types of isolation are commonly quoted in microwave mixers: LO-RF isolation, LO-IF isolation, and RF-IF isolation."
As an example, if a 5-GHz signal with an amplitude of +15 dBm is injected into the LO port, a portion of this signal will leak into the RF port. If this LO input signal causes a 5-GHz signal with an amplitude of -20 dBm to be measured at the RF port, the LO-RF isolation is 35 dB. LO-IF isolation and RF-IF isolation are calculated in the same manner.
"LO-RF isolation is critical in frequency downconverting systems because LO power can leak into the RF circuitry," note the Markis. "If the LO-RF isolation is poor, the LO power can contaminate the RF line. Poor LO-RF isolation can also cause problems in frequency upconverting systems when the LO frequency is very close to the RF output frequency. Because the LO frequency and the RF output frequency are so close, no amount of filtering can remove the LO leakage. As a result, that leakage interferes with the RF output, potentially degrading the RF output circuitry."
LO-IF isolation specifies the amount of leakage from the LO input signal to the IF port. The Markis add, "When the LO-IF isolation is poor, problems can occur if the LO frequency is close to the IF frequency. In this case, the LO signal can contaminate the IF circuitry." With sufficient LO leakage, the IF amplifier will potentially be saturated. The loss flatness also may be degraded if the LO-IF isolation is insufficient.
RF-IF isolation is the final mixer isolation metric. Because the amplitudes of both the RF and IF signals are usually significantly lower than the amplitude of the LO signal, most systems designers will not find RF-IF isolation to be a major issue. However, high RF-IF isolation is usually a sign that the mixer will exhibit low conversion loss with good conversion loss flatness.
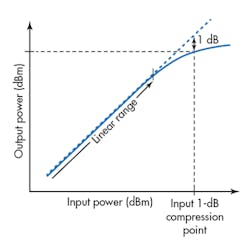
1-dB Compression Point: A mixer’s conversion loss remains constant when the mixer is in linear operation. As the amplitude of the input signal increases, the amplitude of the output signal rises by the same amount. However, once the input signal’s amplitude reaches a certain level, the amplitude of the output signal ceases to exactly follow the input signal. The mixer deviates from linear behavior and its conversion loss begins to increase. A graphical representation of this is shown in Fig. 2.
When a mixer’s conversion loss increases by 1 dB, the 1-dB compression point has been reached. The 1-dB compression point of a mixer is defined as the amplitude of the input signal required to increase the conversion loss by 1 dB. A mixer’s 1-dB compression point determines the upper limit of its dynamic range.
A mixer’s 1-dB compression point is usually related to the LO drive level. Mixers with higher LO drive level requirements have a higher 1-dB compression point. Yet higher LO power also must have to be delivered to such mixers. In general, the 1-dB compression point is anywhere from 4 to 7 dB below the mixer’s minimum recommended LO drive level.
Intermodulation Distortion: Two-tone third-order intermodulation distortion (IMD) occurs when two signals simultaneously enter the mixer’s IF or RF input port. In practice, this could happen in a multi-carrier signal environment. These two signals interact with each other and with the LO signal, which creates distortion. In a receiver, two-tone third-order IMD is a serious problem because it can generate third-order distortion products that fall within the IF bandwidth.
If fRF1 and fRF2 represent two separate RF input signals and fLO represents the LO signal, the third-order distortion products generated at the mixer’s IF port are:
Interferer1 = 2fRF1 - fRF2 - fLO
Interferer2 = 2fRF2 - fRF1 - fLO
These third-order distortion products are extremely close to the desired IF output frequency. No amount of filtering can remove these unwanted distortion products. Thus, the signal-to-noise ratio of the received signal is degraded, highlighting the need to suppress these distortion products.
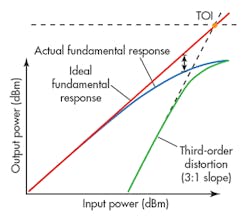
The third-order input intercept point (TOI or IP3) is a widely accepted figure of merit used to describe a mixer’s capability to suppress third-order distortion products. TOI is used in predicting the nonlinear behavior of a mixer as the amplitude of its input signal increases, which causes the third-order products to increase by a 3:1 ratio. For any 1-dB increase in the input signal’s amplitude, the third-order products increase by 3 dB (Fig. 3).
The TOI is the value of the input power when the line representing the fundamental output intersects with the line representing the third-order distortion products. The TOI is really just an extrapolated point, however, because the mixer compresses before the lines actually intersect. Due to the negative impact that third-order distortion products can have in a system, it is desirable for a mixer to have a high TOI.
Mixer Design Techniques
In theory, any nonlinear device can be used to create a mixer circuit. However, only a few devices satisfy the requirements needed to design mixers with acceptable performance. Devices that are commonly used to design modern mixers include Schottky diodes, gallium-arsenide (GaAs) field-effect transistors (FETs), and CMOS transistors. Various topologies can be used to design mixers. Mixers can be designed as either passive or active components.
Passive mixers primarily use Schottky diodes, although the FET resistive mixer has recently become another popular passive mixer. Active mixers use either FETs or bipolar devices. Schottky diodes, in comparison with FETs and bipolar devices, have the advantage of possessing an inherently wide bandwidth. This is a major reason why diodes are still widely used to design mixers.
Mixers can be designed with just a single diode, which is the simplest mixer topology. Balanced mixers, which consist of two, four, or even eight diodes in a balanced structure, build upon the single-diode mixer. The majority of mixers available today incorporate some form of mixer balancing.
A single diode can be used to create a mixer (Fig 4). Here, the RF and LO signals combine at the anode of the diode. The LO signal needs to be large enough to switch the diode on and off, which causes the actual mixing process. The frequency components generated by single-diode mixers are:
fIF = nfLO ±mfRF (m and n are all integers)
where:
fLO = the LO input signal frequency
fRF = the RF input signal frequency
fIF = the IF output signal frequency
Although only one output frequency is desired (when n = 1 and m = 1), additional unwanted harmonics are generated by the diode’s current-voltage (I-V) characteristics and the transconductance modulation caused by the RF signal. Because the single-diode mixer has no inherent isolation between the RF and LO ports, external filters also are needed to achieve isolation between ports. This need for external filtering makes it difficult to achieve wideband mixers with just a single diode.
Balanced mixers overcome some of the limitations of single-diode mixers. They do require baluns or hybrids, which largely determine the bandwidth and overall performance of the mixer. Inherent isolation between ports is achieved by balanced mixers as well as increased cancellation of intermodulation products. Common-mode noise cancellation is another advantage gained by balanced mixers. However, balanced mixers do require a higher LO drive level.
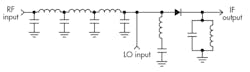
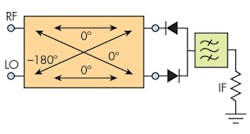
Single-balanced mixers consist of two diodes along with a hybrid (Fig. 5). Although 90-deg. and 180-deg. hybrids can both be used to design single-balanced mixers, the majority of single-balanced mixers incorporate a 180-deg. hybrid. The 180-deg. hybrid’s input ports are mutually isolated, enabling the LO port to be isolated from the RF port. This provides frequency-band independence and equal power division to the load. In comparison with single-diode mixers, single-balanced mixers also have 50% fewer intermodulation products.
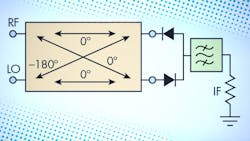
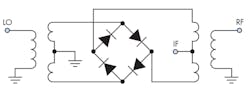
Two single-balanced mixers can be combined to form a double-balanced mixer. Traditional double-balanced mixers are typically based on four Schottky diodes in a quad ring configuration. Baluns are placed at both the RF and LO ports, while the IF signal is tapped off from the RF balun. The IF signal can also be tapped off from the LO balun, but this would worsen the LO-IF isolation.
For this reason, it is usually preferred to tap off the IF signal from the RF balun instead of the LO balun. An example of a double-balanced mixer is shown in Fig. 6. This mixer has high LO-RF isolation and LO-IF isolation along with moderate RF-IF isolation. Double-balanced mixers also have the benefit of reducing intermodulation products by as much as 75% in comparison with single-diode mixers.
An even more complex mixer circuit is the triple-balanced mixer. Triple-balanced mixers have separate baluns for the LO, RF, and IF ports, which enables them to achieve high LO-RF isolation, LO-IF isolation, and RF-IF isolation. Triple-balanced mixers also offer higher suppression of intermodulation products than double-balanced mixers. The downside of triple-balanced mixers is that they need a higher LO drive level. They also are greater in both size and complexity.
In summary, mixers are available in a variety of forms, with varying levels of performance. Several parameters are used to characterize a mixer’s performance. Insight into mixers, as well as their parameters, can help system designers select the proper mixer for their system. The key parameters of a mixer, such as conversion loss, isolation, and intermodulation distortion, are critical factors for any system design.
References
- Marki Microwave, “Mixer Basics Primer.” Available: http://www.markimicrowave.com/Assets/appnotes/mixer_basics_primer.pdf
