Making Those Wireless Myoelectric Sensors Work
Editor's Note: This interview accompanies the story "Healing Heroes, One Wireless Limb at a Time."
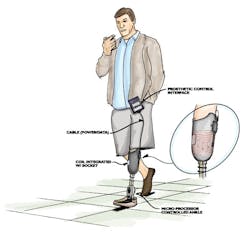
JJD: How is the external coil used to receive data from the implantable sensor chips and power them? What challenges must be overcome when remotely powering a sensing node implanted within tissue?
GG: The implant and external coil operate through their mutual inductance linkage. The coupling coefficient is generally quite small, about 1%, or even less depending on the diameter of the external coil. To improve the interaction, a classic double-tuned transformer is used. There are challenges with providing adequate power with standards that limit the field strength and the specific absorption rate (SAR) around human tissues.
There are also radio regulatory constraints by the FCC, although there are a few frequency ranges that are reserved for medical devices and RFID applications. The challenge is finding an operating frequency range that will allow adequate-strength signals to be generated over enough bandwidth without heating the patient or generating too many emissions. The solution also must fit in a small enough space without needing a sizable battery.
JJD: How is impedance matching and resonant tuning handled with the implantable sensor chips?
GG: The implant and coil are weakly coupled. As a side effect, this means that the primary-to-secondary interaction ranges from weak to non-measurable. This enables each coil to be separately tuned to resonance. For this application, it was desirable to have the implant Q within a low range, as the external coil’s Q is very high. The IMES implant uses on-chip capacitors, which are laser trimmed for resonance of the implant coil, in a parallel resonant configuration with one capacitor.
The overall system design of the double-tuned network takes into consideration the implant’s effective AC resistance and coil inductance in addition to the external coil inductance and coupling coefficient. These considerations ensure that a sufficient magnetic field is provided to the implant—and that a sufficient load modulation signal is returned from the IMES.
JJD: What were the challenges in implementing the 6.78-MHz channel? And what allowed the 121-kHz channel to operate?
GG: The approach taken on this first chip was to accommodate the higher-rate real-time EMG sampling by accessing the 6.78-MHz band, which is allocated for Industrial, Scientific, and Medical (ISM) applications. The 6.78 MHz was generated with a phase-locked-loop (PLL) synthesizer inside the implant (6.78 MHz = 56 × 121 kHz). Unfortunately, the phase coherence for 6.78 MHz is low. It is based on the varying 121 kHz, which is developed with the self-resonating external coil multiplied by a factor of 56.
This created higher than desired errors in the data transfer of the 6.78-MHz binary-phase-shift-key format. Fortunately, for this patient trial, the 121-kHz linkage could accommodate the data transfer of the lower sampling rate required for what is termed integrated EMG. Another issue was the interaction of the 6.78-MHz coil with the 121-kHz coil wound on the same core.
JJD: What RF/microwave design challenges arose when designing and implementing the ASIC chip?
GG: The ASIC was designed with a 0.8-μm CMOS process and the package size was very limited by the need to keep the implant small. To fit the appropriate form factor, the ASIC was designed in a long and narrow configuration. These dimensions were not optimal for circuit layout and routing. They also added processing challenges with dicing and handling.
Additionally, the on-chip capacitor array required considerable space, increasing the design complexity. The next development is targeting a smaller 0.18-μm process. This denser process will help with chip size reduction, thereby easing the packaging and routing issues.
JJD: What RF/microwave technology solutions are needed to develop implantable myoelectric sensors that can support a telemetry channel for full-bandwidth EMG signals?
GG: A next-generation development in progress aims to use the 13.56-MHz RFID band, which can support full-bandwidth EMG at 1 kHz. The 13.56-MHz RFID industry is actively looking for increased data rates for many applications. The regulatory spectral template is fully defined, so no special rules are immediately necessary. The move to this frequency creates some increased complications with coil self-resonance and added concerns with NFC and RFID compatibility. It’s a very crowded electronic world.
JJD: How will full-bandwidth EMG signals improve the performance of prosthetics?
GG: Although this first IMES appears to work fairly effectively for the patient, not all amputees will have all of the residual muscles available for implantation. The availability of the real-time EMG allows the external system to have a more sophisticated processing scheme using these features. It also permits the use of the IMES in targeted muscle reinnervation (TMR). This is viewed as a possibility for amputation of the entire arm, where a limited number of nerve fibers are attached to the pectoral muscle. The IMES can then perform the EMG function with greater integrity than patch electrodes.
JJD: What are the benefits and tradeoffs of implantable myoelectric sensors over percutaneous wires or EMG patches?
GG: The human body does not like invading “not-me” things in the body, and will mount a response to destroy or wall off the object. Openings in the skin are particularly dangerous, as they provide an entrance for infection. Additionally, wires fatigue and break. In early trials with muscle stimulation, the broken wire remnants were difficult to locate and very painful for the patient. For these reasons, the industry has pursued patch electrodes for EMG sensing as a standard approach (similar to ECG/EKG patches). The issue with these patches is the varying skin impedance with temperature, moisture, humidity, and just placement from day to day.
Also, the patches get a combination signal from many muscles and are not very specific to a single motor motion. The change in characteristics of the EMG signals with the patches mean that the patient must re-learn, or try to adapt to, the sensor changes each time the prosthetic is worn. This reduces the confidence in the prosthetic and its utility. It also produces a great deal of patient frustration.
In contrast, the implanted sensor inside the muscle body mitigates all three of these difficulties. It is entirely within the body and becomes encased by tissue within a period of one to three months. It is of course made with biocompatible materials. (This is not an easy problem. The IMES uses specially developed metallic-ceramic braze processes in its package design.) The IMES remains very constant in its location and provides a consistent sensor response. As a result, the patient can become confident in its use and operation.
The location in the muscle body also provides a more highly isolated and specific signal that is associated with just that muscle. This is the goal of what is termed “intuitive” or “direct control” within the industry. The muscles that were previously used are now associated with the new prosthetic motions in a one-to-one relationship. The EMG from the muscles that the patient formerly used to close his or her fingers are now used to activate the prosthetic fingers.
Assessing Interference
JJD: What body interference-related challenges are there with implantable sensor telemetry links?
GG: The operation in and around the body is complicated by the presence of the varying impedance characteristics of the different tissues. For the present applications of the IMES on the residual limbs, it is dominated by the characteristics of skin, blood, muscle, and bone. Each of these tissues has been studied and characterized. However, every individual is unique. This aspect is a critical constraint on the system design and choice of frequencies.
For inductive links, higher frequency means fewer wire turns and more induced electric field from the current. But using higher frequencies means more conduction in the tissue and dielectric coupling to the coils. In the human body, this conductance is strictly controlled to prevent tissue heating and nerve stimulation.
Our lead RF designer has spent considerable time developing the self-resonating technique for the external coil and has several patented modulation techniques. These efforts are aimed at the limited bandwidth and overall system efficiency, which in turn limit battery operating time. In order to make the device surgically friendly, the device is very small in diameter. It can therefore be “injected” into the muscle through a large hypodermic needle rather than requiring a “cut-down” surgery. This places additional constraints on the coil and ASIC construction.
JJD: How is the possibility of external interference and radiation leakage handled for the prosthetic design?
GG: The system has inherent properties that provide a great deal of immunity. The IMES technology is an offshoot of RFID applications, which are near-field techniques. It is difficult to have these systems operate over an extended range--even over a few meters. Unless you’re in the immediate vicinity of an RFID reader (that also operates at 121 kHz), it is unlikely to cause interference with the power and signaling of the external coil to the implant. This is a benefit of near-field technology.
However, the path from the implant to the external coil is at a low power level, and is therefore more susceptible to outside interference. But the prosthetic would probably have to be in the region of a 121-kHz reader for complications from interference to occur.
About the Author
Jean-Jacques DeLisle
Jean-Jacques graduated from the Rochester Institute of Technology, where he completed his Master of Science in Electrical Engineering. In his studies, Jean-Jacques focused on Control Systems Design, Mixed-Signal IC Design, and RF Design. His research focus was in smart-sensor platform design for RF connector applications for the telecommunications industry. During his research, Jean-Jacques developed a passion for the field of RF/microwaves and expanded his knowledge by doing R&D for the telecommunications industry.
