Army Projects Robots Capable of Shapeshifting
Shapeshifters were once the basis for far-fetched science fiction drama. They are now on the outskirts of robot-based research being performed by the U.S. Army and associates, including the Georgia Institute of Technology and Northwestern University with their work published their findings in the technical journal Science Robotics. The Army was pursuing a new form of locomotion made possible by building larger robots from smaller robots known as smart active particles, or “smarticles”. This initial research could lead to robotic systems capable of changing their shapes, modalities, and functions.
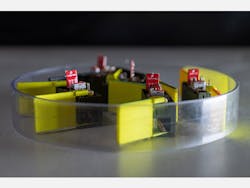
The miniature battery-powered robotic smarticles are created by 3D printing and are designed for a single function: to flap two arms. But when five of the smarticles are placed in a confined, circular configuration, they can be used to form a robophysical system called a “supersmarticle” that can move by itself as a single unit. With additional sensors, the supersmarticle can be controlled to maneuver in different motions, even through complex maze patterns.
Sam Stanton, program manager, complex dynamics and systems at the Army Research Office, an element of U.S. Army Combat Capabilities Development Command’s Army Research Laboratory (ARL), explained: “For example, as envisioned by the Army Functional Concept for Maneuver, a robotic swarm may someday be capable of moving to a river and then autonomously forming a structure to span the gap.” By learning to control and program early versions of the supersmarticles, it is hoped that they can be created advanced enough to eventually change forms by changing the relative positions of the component smarticles.
“These are very rudimentary robots whose behavior is dominated by mechanics and the laws of physics,” said Dan Goldman, a Dunn Family professor in the School of Physics at the Georgia Institute of Technology and the project’s principal investigator. “We are not looking to put sophisticated control, sensing and computation on them all. As robots become smaller and smaller, we’ll have to use mechanics and physics principles to control them because they won’t have the level of computation and sensing we would need for conventional control.”

About the Author
Jack Browne
Technical Contributor
Jack Browne, Technical Contributor, has worked in technical publishing for over 30 years. He managed the content and production of three technical journals while at the American Institute of Physics, including Medical Physics and the Journal of Vacuum Science & Technology. He has been a Publisher and Editor for Penton Media, started the firm’s Wireless Symposium & Exhibition trade show in 1993, and currently serves as Technical Contributor for that company's Microwaves & RF magazine. Browne, who holds a BS in Mathematics from City College of New York and BA degrees in English and Philosophy from Fordham University, is a member of the IEEE.
