Millimeter-Wave Automotive Radar Testing Must be Flexible (.PDF Download)
One of the most ambitious areas of automotive innovation is autonomous driving, where precision sensors provide input to real-time decision-making algorithms. Most autonomous driving strategies use some combination of a sensor set, including optical, LiDAR, and radar systems. Sensors can be deployed at different locations around the vehicle, with each being responsible for providing critical input information to decision-making algorithms.
The radar sensor is tasked with identifying and spatially locating mass-based obstacles. These can include other vehicles, bicyclists, pedestrians, animals, and even fixed obstacles. The key metrics when analyzing the performance of a radar sensor is how reliably it can resolve objects (range resolution), how much it can resolve velocity of objects (velocity resolution), and the size of the antennas that dictate placement.
The first two parameters above are governed by the radar’s bandwidth, while the third is governed by the radar’s center frequency. Understanding the radar’s set of responsibilities in an advanced driver assistance system (ADAS) is key to determining how to measure its performance.
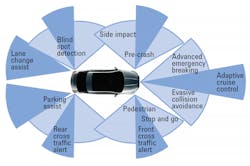
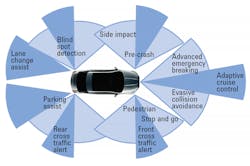
1. Shown are typical automotive mmWave radar applications and mounting locations.
In vehicles, radars are typically integrated in two main locations—either in the four corners or looking out the front of the vehicle (Fig. 1). The corner-looking applications are typically for short-range applications, such as blind-spot detection, lane-change assist, and front/rear collision-warning alert. The front-looking applications are typically mid- to long-range applications, such as emergency braking systems and adaptive high-speed cruise control on highways.